by The Bolton Group

Homemade GOTO mount - shown with C8 tube
|
A Poor Man's Paramount
by The Bolton Group Homemade GOTO mount - shown with C8 tube |
 Advantage of the German mount - different tubes can be mounted
|
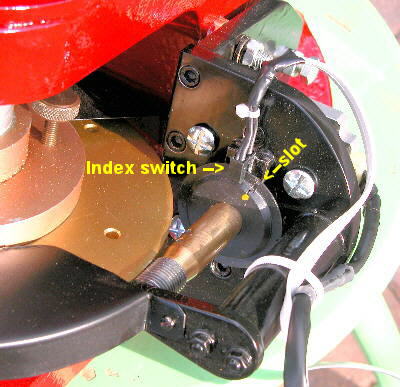
Introduction It's red & black, it has Byers gears, it has GOTO....but is it a Paramount? Definitely not! But at slighly less cost (1/10th) it is our answer to a computer controlled German mount. It uses AWR's stepper motor GOTO drive system. This British alternative has micro-stepping, periodic error correction and the ability to interface with Planetarium software such as SkyMap. It runs quietly too - no waking the neighbours during the night! It will however function without a computer and the latest version of the software has in-built object databases (see later).The Mount The mount is over 20 years old but is built to carry a massive load. It features solid steel shafts, 2 inch diameter for the RA and 1.5 inch for the DEC plus oversize ballbearings. The castings are aluminium. It was updated with new Byers worm gears (probably the best in the world) - 7.5 inch 360 teeth for the RA and 4.7 inch 359 teeth for the DEC. Both have stainless steel worms. The 7.5 inch gears were originally made for upgrading SCTs. The smaller gears were made for the CamTrak. These were some of last available. Brian made the new gear mountings and clutches. Both worm mountings have adjusters so the mesh between the worm and wheel can be finely adjusted. Conventional wisdom is that you don't have clutches on GOTO mounts. Common sense says you do! It anything should go wrong - and remember in the dark things do - they could save your gear teeth. To minimise backlash (the killer for GOTO mounts) the stepper motors are coupled direct to the the end of the worm shafts - no spur gears here. It has periodic error correction using a infrared index switch and a disk with a slot attached to the worm shaft. The mount was originally set up in the Yorkshire Dales. The polar alignment was carried out using the AWR two star calibration method which returns the alt and az errors making homing in on the pole relatively straight forward. Residual errors were 0.01 degrees in both alt and az. The loded vesrion of the AWR software is 1.6 which provides comprehensive databases (no planets yet). I had a few teething problems with this upgrade - it has a few new parameters to enter which are zero by default and until they are changed the mount declares most objects below the horizon. The periodic error correction recording was also lost and has to be re-entered. I do this with a webcam now and IRIS software rather than looking through an eyepiece at an illuminated reticule. |
 Byers gears to both axes - note direct drive from motors to worm shafts
|